


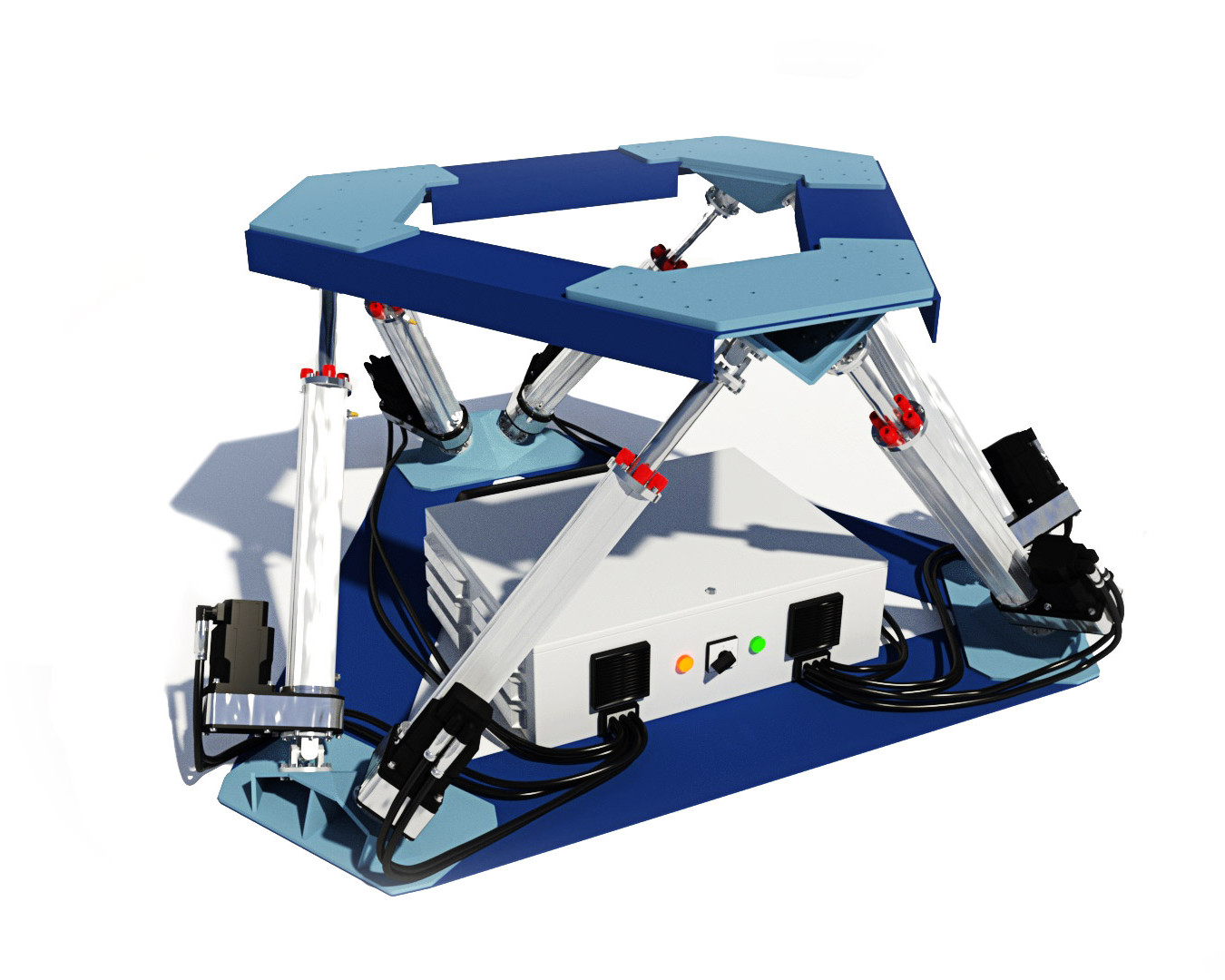
Platforma ruchu o 6 stopniach swobody zbudowana w oparciu o siłowniki elektryczne z opcją wspomagania pneumatycznego.
System umożliwia dynamiczną i precyzyjną zmianę położenia obiektu, o znacznych gabarytach i masie, w obszarze roboczym maszyny. Parametry techniczne produktu mogą być dostosowane do indywidualnych potrzeb klienta.

Platforma Stewarta serii ATMX6000 jest produktem zaprojektowanym i wytwarzanym przez ODIUT Automex sp. z o.o.
Platforma Stewarta stanowi kluczowy podzespół wysokiej klasy symulatorów pojazdów samochodowych i samolotów. Jego zadaniem jest zapewnienie generowania wrażenia ruchu podczas przeprowadzania symulacji, co uzyskuje się przez odpowiednie sterowanie elementami wykonawczymi (siłowniki liniowe z śrubami kulowymi) do uzyskania dynamicznego ruchu w sześciu stopniach swobody w jego przestrzeni roboczej.

System ATMX6000 został nagrodzony Złotym Medalem na Targach Techniki Motoryzacyjnej TTM 2014 w Poznaniu.
Zastosowanie platformy Stewarta:
|
Moc znamionowa: |
13,5 kW |
|
Dopuszczalna masa ładunku: |
1200 kg |
|
Dopuszczalne momenty bezwładności ładunku: |
Ixx=600 kg m2 Iyy=600 kg m2 Izz=600 kg m2
|
|
Maksymalne przesunięcie środka ciężkości obciążenia w osi z: |
600 mm |
|
Liczba stopni swobody: |
6 |
|
Napięcie zasilania: |
3x230 VAC |
|
Wysokość platform w płożeniach: |
|
|
Zakres ruchu liniowego w osiach x, y i z: |
± 270 mm |
|
Zakres ruchu kątowego wokół osi x, y i z: |
± 22 deg |
|
Maksymalna prędkość liniowa w osiach x, y i z: |
420 mm/s |
|
Maksymalna prędkość kątowa wokół osi x, y i z: |
35 deg/s |
|
Maksymalne przyspieszenie liniowe w osiach x, y i z: |
6 m/s2 |
|
Maksymalne przyspieszenie kątowe wokół osi x, y i z: |
430 deg/s2 |
|
Skok siłownika: |
500 mm |
{kind=link}